The efficient automation brought by the truss manipulator can save manpower and material resources for enterprises. Its current application in loading and unloading transportation is very mature, and it is usually used with the assistance of automatic equipment such as machine tools and punches. How does the truss manipulator work? Now the manufacturer of automatic assembly line will show you.
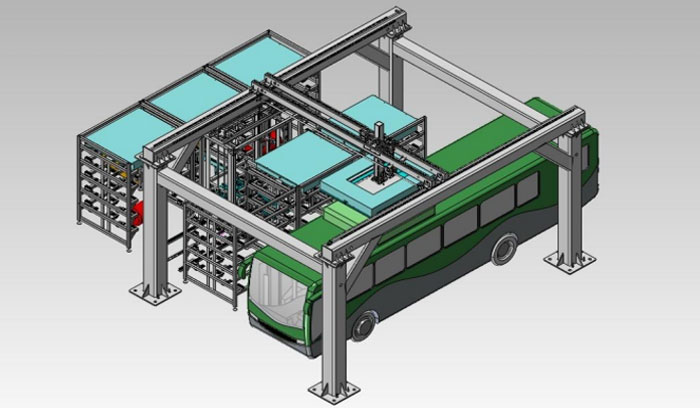
Truss manipulator is an automatic equipment based on the rectangular X, Y, Z coordinate system. It can complete the trajectory movement of the workpiece in the three coordinate system. Its work process is as follows:
1. Grab the blank and put it on the pallet of the workbench:
The blank is usually transported to the designated position by the chain conveyor belt, and the preliminary positioning is stopped by the pneumatic or electric positioning mechanism to ensure that each truss manipulator grabs the parts from the same position. When the X axis moves to the right in front of the blank, the movement stops, and the Z axis moves downward so that the open gripper can just grasp the blank. At this time, close the gripper to grasp the blank. Then, when Z moves up to the specified height (without collision), X axis moves left to the right above the pallet, and then Z axis moves down to load the blank into the chuck or tooling. Then the chuck clamps, the Z-axis rises above the machine tool shield, and the X-axis moves above the blank or the waiting chuck.
2. The process of removing parts from the pallet and placing them in a specific position:
When the X axis moves directly above the chuck, the Z axis moves downward to make the gripper just grasp the workpiece, and then the air pressure is applied to make the gripper merge and grasp the workpiece. At this time, the control system of the truss manipulator controls the release of the hydraulic chuck. When the control system receives the chuck release signal, the Z axis moves up to the protective plate of the machine tool, and then the X axis moves left (depending on the material release position) to move the workpiece directly above the material release position. At this time, the Z-axis falls onto the workpiece and onto the feeding part. Then, open the pawl and lift the Z-axis, so as to complete the reclaiming and placing process.
The above truss manipulator's loading and unloading working conditions and the way of action layout need to be in the same line with the position of the supporting loading and unloading mechanism of the mechanical arm, such as the material tray, chuck, etc., so as to meet the truss manipulator's request for X-Z two-dimensional motion, otherwise another Y-axis will be added to complete the three-dimensional motion. As a large-scale non-standard automation equipment manufacturer, Langwei Electromechanical can now undertake the truss manipulator manufacturers of various enterprises to customize and create professional requirements for you!

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City