Truss robots are used in industrial automation consumption lines, and workpieces often need to be transported back and forth between assembly lines and machine tool processing stations. At present, universal industrial robot manipulators are widely used for loading and unloading of completion machine tools on automatic assembly lines. Articulated industrial robots have large load, high accuracy and programmable actions, but they are expensive and uneconomical to use when the transportation route is relatively simple. Now, truss manipulator is applicable to the manipulator in the loading and unloading link where the positioning accuracy of the machine tool processing station is high, but the handling action is relatively simple.
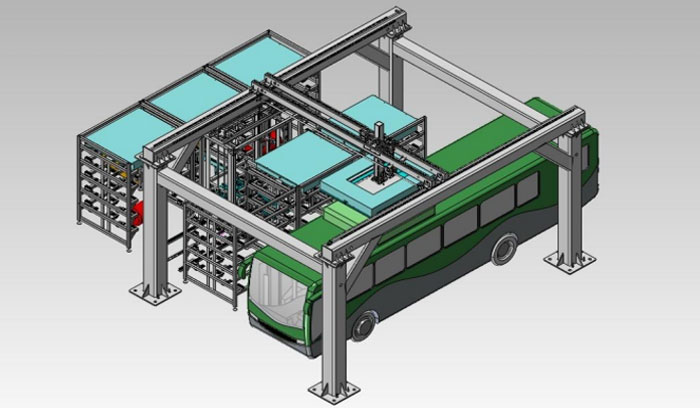
The space motion of truss robot is completed by three mutually straight linear motions. Because the linear motion is easy to meet the closed-loop position control, the truss robot may achieve high position accuracy( μ M). In order to complete a certain movement space, the structure scale of truss robot is much larger than that of other types of robots. The working space of the truss robot is a space cuboid.

The truss consists of several supporting parts of the gantry structure, on which is provided a beam for the manipulator. The truss manipulator is a manipulator with three degrees of freedom. The truss robot consists of a horizontal motion component installed on the beam and a straight motion component installed on the horizontal motion component. The bottom of the straight motion component is connected with a three claw gripper, The horizontal motion component and the vertical motion component separately comprise a gear and a rack for transmission, and the gear and rack are arranged as helical teeth that mesh with each other.
The truss type robot has simple and reliable structure and low cost; Helical gear mesh is selected for gear and rack transmission, which increases the mechanical working load and ensures smooth running. Truss manipulator has simple structure, low cost and high accuracy. After that, the workpiece will be transported horizontally and straightly between the assembly line and the corresponding machine tool processing station.
The loading and unloading robot of the machine tool selects industrial robots to replace manual labor, and completes a series of process missions such as taking, transferring, loading and unloading of workpieces during the processing of processing, CNC lathes, stamping, forging and other machine tools, so as to end the lack of people or unmanned consumption line in the workshop, thus reducing cost, advancing work efficiency and production quality, and improving the economic efficiency of the enterprise.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City