The technical level and level of the flexible processing automatic production line in China are significantly higher than those in foreign countries. The flexible parts processing automatic assembly line transported by truss manipulator is widely used in foreign countries, but there are few in China, and most of them are the production lines planned by foreign companies.
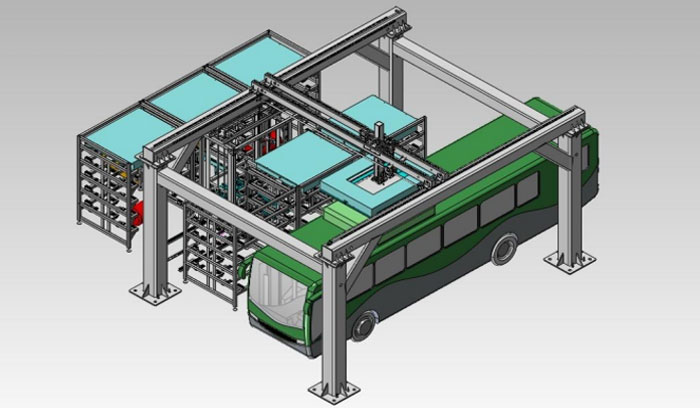
Structure and characteristics of truss manipulator
The truss manipulator is composed of three basic parts: main body, drive system and control system. Generally, it is also called right angle coordinate manipulator. Its main body is usually of gantry structure, which is composed of Y-direction beam and guide rail, Z-direction ram, cross slide, column, transition connecting plate and base. The Z-direction linear motion is that the AC servo motor drives the gear through the worm gear reducer to roll with the Y-direction beam and the fixed rack on the Z-direction ram, driving the moving parts to move quickly along the guide rail. The moving parts are light cross slide and Z-direction ram, and the ram is made of aluminum alloy. The cross beam is made of square steel profiles. There are guide rails and racks on the cross beam, which are contacted with the guide rails through rollers, and the entire manipulator is on it.
Because the truss manipulator has fast delivery speed, large acceleration and short acceleration and deceleration time. When transporting heavy workpieces, the inertia is large. Therefore, the servo drive motor must have satisfactory driving and braking ability, and the supporting elements must also have satisfactory rigidity and strength. Only in this way can the servo motor satisfy the requirements of high response, high stiffness and high precision of the truss manipulator.
Under the condition of selecting a suitable servo motor, the displacement and trajectory of the servo system are calculated and the PID parameters of the driver are dynamically adjusted according to the material movement interval and the running beat. According to the received displacement and speed commands, the truss manipulator, after being changed, amplified and adjusted, escapes to the motion unit. The operation status is detected in real time by the optical fiber sensor. During the high-speed transfer, the moving parts reach the given speed in a short time, and can stop instantly during the high-speed travel. After the interpolation operation of the high-resolution Kenting encoder, The influence of manipulation mechanical errors and measurement errors on motion accuracy.
The truss manipulator shall be selected according to the quality of the workpiece to be transported and the processing rhythm. The arm and clamping method of the manipulator are planned according to the shape and structure of the workpiece to be transported and the clamping method of the machine tool fixture.
Manipulators can process and perform tasks by means of programmable programs. Manipulators are mainly composed of arms, rotary devices, moving parts and driving parts. The workpiece is clamped by positioning the workpiece profile or the workpiece positioning support point. The clamping and positioning module can select the serialized design plan according to the product quality and the size of the shape. The clamping and positioning module device method of the manipulator is similar. For the workpieces that do not have a series, it is only necessary to switch the corresponding clamping and positioning module, satisfying the needs of fast switching and improving the flexibility of the truss manipulator.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City