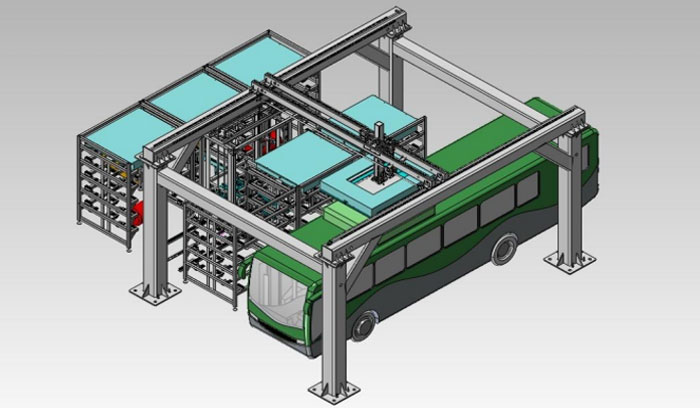
The manufacturer of the automated assembly line tells you that the industrial manipulator is an automatic operating device used in industry, which can imitate some motion functions of the human hand and arm, and is used to grasp and carry objects or operate tools according to fixed procedures. Industrial loading and unloading manipulator is a new device developed in the process of mechanization and automation.
In the modern production process, industrial robots are widely used in automatic production lines. The development and production of industrial robots has become a rapidly developing new technology in the high-tech field. It has further promoted the development of robots, enabling them to better realize the organic combination with mechanization and automation.
In the manufacturing processing and production, although the industrial manipulator is not as flexible as the human hand, it has the characteristics of being able to repeatedly work and work, not knowing fatigue, not afraid of danger, and more powerful than the human hand in lifting heavy objects. Therefore, the industrial manipulator has been valued by many departments, and has been more and more widely used.
化裝配線價(jià)格")
The motion and working requirements of industrial manipulator are directly related to the structure, working range, bearing capacity and motion accuracy of the arm. These factors directly affect the working performance of the manipulator. Sometimes they are contradictory, with good rigidity, heavy load, large structure and many guide rods, increasing the self weight of the arm; If the moment of inertia increases, the impact force will be large and the position accuracy will be low.
Therefore, when designing the arm, it is necessary to comprehensively consider various factors such as the grasping weight of the manipulator, the number of degrees of freedom, the working range, the speed of movement, the overall layout and working conditions of the manipulator, so as to achieve accurate, reliable, flexible action, compact structure, large stiffness and small self weight, thus ensuring a certain position accuracy and adapting to rapid action. In addition, thermal radiation should also be considered for hot working manipulators. Industrial manipulators should be longer to keep away from heat sources and equipped with cooling devices. The robot system integration prompts that dust prevention facilities should be added to the robot arm for dust operation.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City