From handicraft factory to mechanical power production, to the fact that science and technology determine survival, from cheap labor to earn enterprise profits, to the fact that labor is the bottleneck and expenditure of enterprise development, we can only change our concept, focus on the future, keep pace with the times, and prepare for the great development of our enterprise's automation industry. The enterprise provides automatic equipment such as truss manipulator, CNC machine tool loading and unloading manipulator, which can realize the complete automation of the machine tool manufacturing process, and adopts integrated processing technology, which is applicable to the loading and unloading of production lines, workpiece turnover, workpiece transfer, etc.
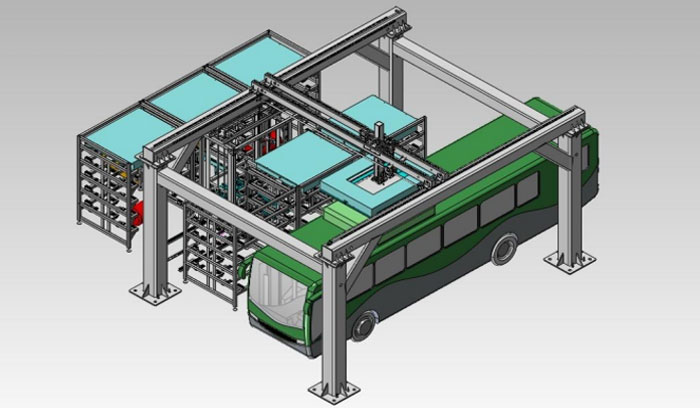
Truss type loading and unloading manipulator generally goes through the following processes to realize loading and unloading:
1) Actions of the truss manipulator during the loading process:
The NC mechanical arm moves to the top of the workpiece reclaiming position along the X axis and stops, then the Z axis moves downward so that the open gripper can just grasp the workpiece. After the closed gripper grabs the workpiece, the Z axis moves upward again to the specified height, and then moves to the top of the worktable chuck along the X axis direction, and then the Z axis moves downward to load the workpiece into the chuck or tooling. Then the chuck clamps, the Z-axis rises above the machine tool shield, and the X-axis moves to the waiting position to wait for the machine tool to finish processing the workpiece.
器人系統(tǒng)集成廠家")
2) The action of the truss type loading and unloading machine during the unloading process:
After the workpiece processing is completed, the X axis moves to the right top of the chuck, the Z axis moves downward so that the gripper can just grasp the workpiece, and then air pressure is applied to make the gripper merge and grasp the workpiece, the chuck is released, the Z axis moves up to the appropriate height, and then moves along the X axis until the Z axis reaches the feeding position, the Z axis drops to the feeding point, the Z axis is lifted after the gripper is opened for feeding, and the next feeding process is started.
The robot system integration tells you that the path of the above action arrangement needs to be in the same line with the position of the loading and unloading mechanism, such as the material tray and chuck, which are matched with the truss manipulator, so as to meet the requirements of the mechanical arm for X-Z two-dimensional motion. If the actual situation is difficult to meet, you can add another Y axis to the mechanical arm, so that the CNC mechanical arm can carry out X-Y-Z three-axis three-dimensional movement, and its flexibility can be greatly enhanced.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City