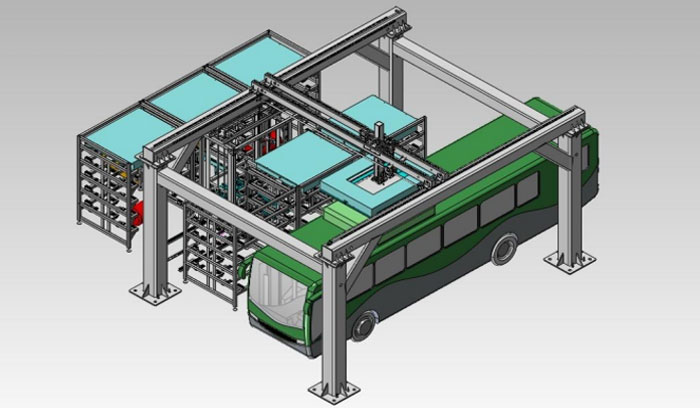
Truss robots and loading and unloading manipulators, as high-tech products, can replace manual work with automatic machining production lines in the practical application of factories. The gripper is one of the important parts of the truss robot. What about the holding design of the truss manipulator? The truss manipulator manufacturer will tell you:
1. Strive to be simple in structure, light in weight and small in size: the truss robot hand is at the front end of the wrist, and its motion state is changeable when working. Its structure, weight and volume directly affect the structure, weight, positioning accuracy, motion speed and other performance of the entire truss manipulator. Therefore, when designing the hand, we must strive for simple structure, light weight and small volume.
2. Fingers should have certain strength and stiffness
3. Appropriate clamping force: When the truss robot hand is working, it should have appropriate clamping force to ensure stable and reliable clamping, small deformation, and no damage to the machined surface of the workpiece. The clamping force of workpieces with poor rigidity should be designed to be adjustable, and self-locking safety devices should be considered for bulky workpieces.

4. Sufficient opening and closing range: the fingers of gripping hands are equipped with opening and closing devices. When working, the opening and closing position of a finger with a large change is called the opening and closing range.
5. Other requirements: According to the shape of the workpiece, the commonly used external snap type two finger jaws are used. The clamping method is normally closed spring clamping. When loosening, a single acting hydraulic cylinder is used.
The truss robot arm is the main executive part of the manipulator. Its role is to support the wrist and hand and drive them to move in space. The purpose of arm movement is generally that the handle reaches any point within the range of spatial motion. From the perspective of the force on the arm, it directly bears the dynamic and static loads of the wrist, hand and workpiece during work, and its own motion is more, so the force is more complex. The robot system integration manufacturer tells you that the accuracy of the truss robot is mainly reflected in the position accuracy of the hand, so it is particularly important to select appropriate guidance devices and positioning methods.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City