In the industrial automation production line, workpieces often need to be transported back and forth between the assembly line and the machine tool processing station. At present, loading and unloading of machine tools are realized on automatic assembly lines, and universal industrial robot manipulators are widely used. Although the articulated industrial robot has large load, high accuracy and programmable action, it is expensive and is not cost-effective for enterprises to use it in workstations with relatively simple handling paths. In addition, many domestic processing enterprises are small in scale and weak in economic strength. It is difficult to replace manual automation with industrial robots. In order to solve this problem, domestic automation equipment manufacturers have developed and manufactured truss manipulators for small and medium-sized processing enterprises to achieve automation. At present, truss manipulator is mainly used in CNC machine tool loading and unloading, machining center, automatic production line and other workstations.
械手")
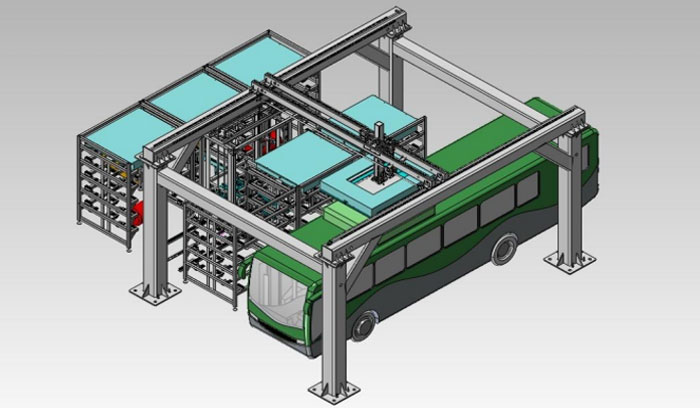
The truss of the truss manipulator includes several supporting parts of the gantry structure, on which a beam for installing the manipulator is set. The truss manipulator is a manipulator with three degrees of freedom. The truss manipulator includes a horizontal motion component installed on the beam and a vertical motion component installed vertically on the horizontal motion component. The bottom of the vertical motion component is connected with a three claw holder, The horizontal motion component and the vertical motion component respectively include a gear and a rack for transmission, and the gear and rack are arranged as helical teeth that mesh with each other.
The space motion of truss manipulator is realized by three mutually perpendicular linear motions. Because linear motion is easy to realize full closed loop position control, truss manipulator is likely to achieve high position accuracy( μ M). In order to achieve a certain movement space, the structural size of truss robot is much larger than that of other types of robots. The workspace of truss manipulator is generally a space cuboid.
The truss manipulator has simple and reliable structure, convenient maintenance and operation, and low investment cost; The precision is high. The grinding precision gear and rack drive are used to increase the mechanical working load, improve the running stability and ensure the accuracy. It has a wide application field and is not limited by the working environment. It has successfully replaced manual labor and is favored by small and medium-sized processing enterprises!

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City