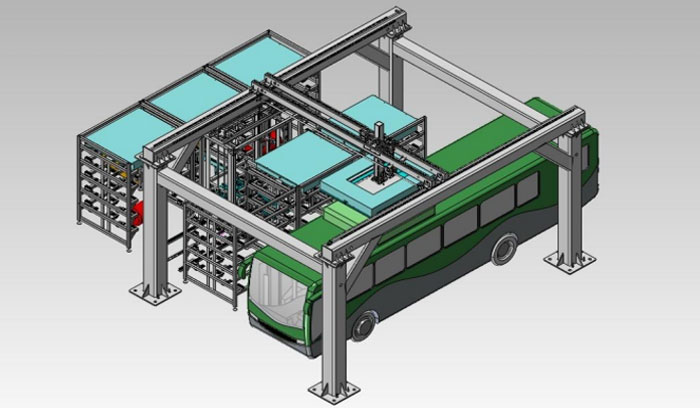
The manipulator consists of six parts: structural frame, X-axis component, Y-axis component, Z-axis component, fixture and control cabinet.
Including:
1. The structural frame is mainly composed of columns and other structural parts, which is used to raise each axis to a certain height, and is mainly composed of aluminum profiles or square tubes, rectangular tubes, round tubes and other welding parts;
2. X axis component, Y axis component and Z axis component, the three motion components are the core components of the truss manipulator, and their definition rules follow the Cartesian coordinate system
Each axis component of a truss manipulator is usually composed of five parts: structural parts, guide parts, transmission parts, sensor detection components and mechanical limit components.
1) Structural members are usually composed of aluminum profiles or square tubes, rectangular tubes, channel steels, I-beams and other structures. They are used as the installation base of components such as guide members and transmission members, and are also the main bearers of manipulator loads.
2) The guide elements are commonly used as linear guide, v-shaped roller guide, U-shaped roller guide, square guide, dovetail groove and other common guide structures. Their specific application depends on the actual working conditions and positioning accuracy.
3) There are generally three types of transmission parts: electric, pneumatic and hydraulic. The electric ones include gear rack structure, ball screw structure, synchronous belt transmission, chain transmission and wire rope transmission.
4) The sensor detection element usually uses the travel switch at both ends as the electrical limit. When the moving component moves to the limit switch at both ends, the mechanism needs to be locked to prevent it from overtravel; In addition, there are origin sensors and position feedback sensors.
5) Mechanical limit group is used for rigid limit beyond electric limit travel, commonly known as dead limit.
3. The fixture has different forms according to the shape, size and material of the workpiece, such as vacuum suction cup, chuck clamping, holding or needle type fixture insertion.
4. The control cabinet, which acts as the brain of the truss manipulator, collects the input signals of each sensor or button through the industrial controller to send instructions to each actuator to execute according to the established actions.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City