


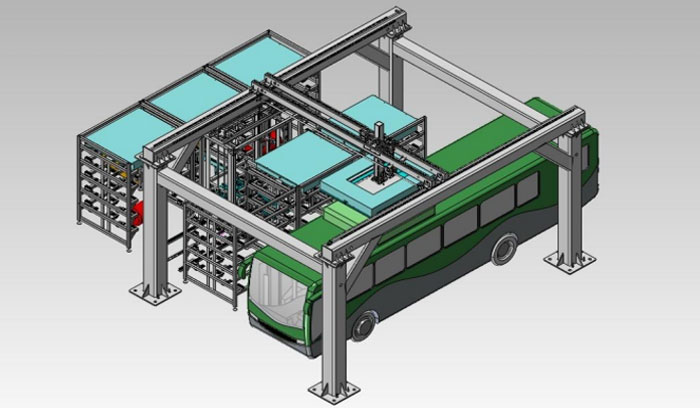



The truss manipulator is a flexible and high-precision automation device that can perform a variety of tasks on industrial production lines. It usually consists of a series of truss structures connected together, where each joint can be moved by an electric motor.
The main task of a truss manipulator is to perform specific operations in a given work area, which may involve the handling of objects, assembly, welding, cutting, etc. To achieve these operations, the manipulator needs to plan a path to move through three-dimensional space and place its end exactly on the target position. Therefore, path planning is one of the core functions of the truss manipulator.
Complex path planning is to determine the trajectory of the manipulator in a complex environment. In the real world, the working environment is often complex and changeable, with various obstacles and constraints. The truss manipulator needs to plan a suitable path according to these conditions, so that it can avoid obstacles, follow safety rules, and be able to efficiently complete the task.
To achieve complex path planning, you first need to model and sense the working environment. The robot can use sensors to obtain environmental information, such as cameras, lidar, etc. By analyzing this data, the robot can understand the location and properties of the surrounding obstacles, so as to avoid these obstacles and plan a suitable path. With the continuous advancement of computer vision and sensing technology, robotic hands are able to perceive and model complex environments more accurately.
After obtaining the environment model, the manipulator needs to generate the path using a path planning algorithm. There are many kinds of path planning algorithms, common ones are A* algorithm, Dijkstra algorithm, RRT algorithm and so on. These algorithms can calculate a z-best path to avoid obstacles according to the starting position, target position and environment model of the manipulator. In order to improve the planning efficiency, the optimization algorithm can also be used to optimize the path, making the manipulator more efficient when performing tasks.
However, it is not easy to implement complex path planning. First, the complexity of the environment increases the difficulty of path planning. If there are a lot of obstacles in the environment, or there are a lot of constraints, such as the workspace of the manipulator, the shape of the object, etc., then path planning will be more difficult. Secondly, path planning is also very computationally intensive, especially for truss manipulators with high degrees of freedom, and traditional path planning algorithms may take a long time to generate paths. In addition, even if a path is generated, the robot needs to have the ability to adjust the path in real time to respond to environmental changes or other unexpected situations.
In order to overcome these difficulties, researchers have proposed many improved path planning methods. For example, machine learning techniques can be applied to path planning to predict and generate new paths by learning a large number of path samples. In addition, heuristic search method can be used to narrow the search scope and speed up the path planning process by introducing heuristic function. In addition, technologies such as parallel computing and big data processing can be used to improve the speed and efficiency of path planning.
In general, truss manipulators can realize complex path planning, but some technical and algorithmic difficulties need to be overcome. With the continuous development of science and technology, it is believed that truss manipulators will have more breakthroughs and innovations in complex path planning.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City






