


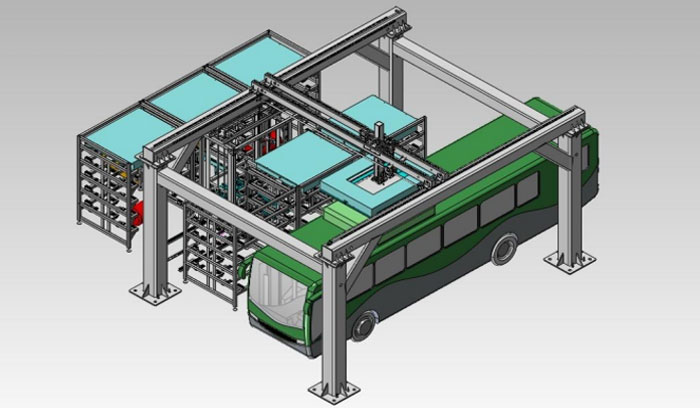



Truss manipulator is an important equipment used in industrial automation production line, which needs to achieve a high degree of precision in control. The following will be from the mechanical structure, sensing system, control algorithm and other aspects of the truss manipulator to achieve accurate control methods.
First, the mechanical structure of the truss manipulator is crucial for accurate handling. The manipulator is usually composed of joints, chain rods and actuators, and the design and manufacture of these components directly affect the accuracy of the manipulator. In the joint part, high-precision transmission mechanism, such as reducer and servo motor, should be used to achieve high-precision Angle control. At the same time, the material and manufacturing process of the chain rod should also have a high degree of stability and precision to ensure the movement accuracy of the manipulator. In addition, in terms of actuators, equipment with stable quality and high precision should be selected, such as precision positioning fixtures and vacuum suckers, to ensure the stability and accuracy of the manipulator when controlling the object.
Secondly, the sensing system of the truss manipulator also plays an important role in accurate control. Advanced sensing systems can provide accurate position and environment information to help the manipulator achieve precise control. In terms of position perception, sensors such as laser rangefinders and encoders can be used to measure the position and attitude of the end of the manipulator in real time. At the same time, visual perception technology is also often used in the precision control of the manipulator. Through the camera and image processing algorithm, real-time monitoring and recognition of the target object can be realized, so that jing can control the trajectory of the manipulator. In addition, sensing devices such as force and torque sensors can also be used to detect the force and torque of the manipulator in the process of manipulation in real time, so as to carry out force control or force feedback adjustment of the manipulator.
Finally, the control algorithm of the truss manipulator is the core to achieve accurate control. The control algorithm of manipulator is divided into two aspects: position control and force control. In position control, the commonly used methods include PID control, motion planning, trajectory tracking and so on. By comparing the difference between the current position of the manipulator and the target position, the PID control algorithm calculates the control signal and makes the manipulator move towards the target position. The motion planning algorithm generates the reasonable motion trajectory of the manipulator by analyzing the target position and obstacles. The trajectory tracking algorithm adjusts the control signal in real time by detecting the current position and moving speed of the manipulator, so that the manipulator can move along the specified trajectory accurately. In the aspect of force control, the force control algorithm can be used to realize the stable grip of the manipulator on the object, such as pressure control and impedance control.
In summary, the key to achieve accurate control of truss manipulator lies in the effective combination of mechanical structure, sensing system and control algorithm. Through the use of precision mechanical structure, equipped with advanced sensing system and advanced control algorithm, the precise control of the truss manipulator can be achieved to improve production efficiency and product quality. At the same time, with the continuous development of science and technology, more innovative methods and technologies will be applied to the precise control of the truss manipulator, further improving the accuracy and intelligence level of the manipulator.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City

