


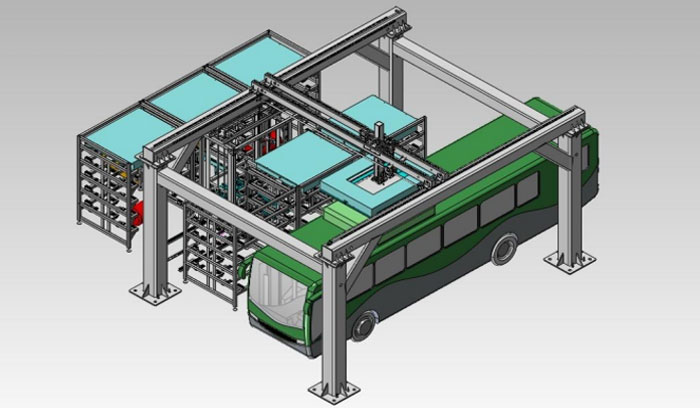



With the continuous improvement and development of industrial automation, the robot has gradually become one of the necessary tools for intelligent manufacturing. The truss manipulator is one of them, which is widely used in various production lines, which can greatly improve production efficiency and accuracy, and reduce labor costs and manual errors. However, how to improve the working efficiency of the truss manipulator is still a problem worth paying attention to.
1. Optimize the program design
The program design has a decisive influence on the working efficiency of the manipulator. Reasonable program design can reduce the time of waiting, moving and staying of the manipulator, so as to improve the working efficiency of the manipulator. In the program design, a reasonable path and distance should be set as far as possible to avoid repeated operation of the manipulator and improve the operation speed, so as to achieve the purpose of improving efficiency.
2. Improve the mechanical structure
The structure of the manipulator and the design of the mechanical system will also have a great impact on the efficiency of the manipulator. Therefore, the mechanical structure of the manipulator can be optimized to improve the working efficiency of the manipulator. For example, the use of lightweight, high-strength materials as the fuselage of the manipulator, the use of precision transmission structure and high-speed motors, improve the speed and accuracy of the manipulator, so that the work efficiency of the manipulator has been greatly improved.
3. Strengthen sensor monitoring
The sensor is one of the core components of the manipulator, which can realize real-time monitoring of the working environment and the object being operated. Therefore, strengthening the monitoring of the sensor can improve the work efficiency of the manipulator. For example, the installation of pressure sensors on the arm or suction cup of the manipulator can achieve real-time monitoring of the weight and size of the object being manipulated, thus greatly reducing the error of the manipulator operation.
4. Improve the robot's learning ability
The robot's learning ability is another important factor for the robot, which allows the robot to better cope with a variety of different production environments and operational tasks. For example, robot learning can enable the manipulator to learn the operating methods and paths independently, further improving the efficiency and accuracy of the manipulator.
5. Further optimize the control system
The control system of the manipulator is the brain of the manipulator, which not only directly affects the response speed and accuracy of the manipulator, but also determines the stability and safety of the entire production process. Therefore, optimizing the control system of the manipulator can better control the operating speed, frequency and path of the manipulator, thereby improving the working efficiency and safety of the manipulator.
In general, improving the work efficiency of truss manipulators requires comprehensive consideration of various factors, and the implementation of targeted solutions for specific problems. Only through continuous scientific and technological innovation and technical optimization can we further improve the work efficiency and productivity of the manipulator and make greater contributions to the development of industrial automation.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City

