


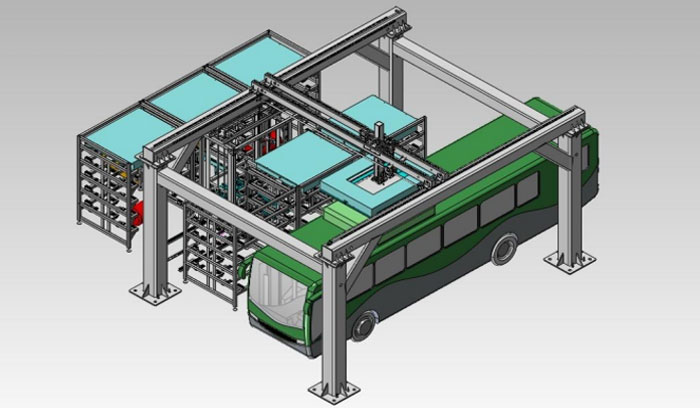



Truss manipulator is a unique robot operation technology, because of its high precision, high efficiency and repeatability, and is widely used in various industrial manufacturing and assembly fields, such as the automotive industry, electronic manufacturing, medical equipment, precision instruments and so on. The performance of the truss manipulator is evaluated from the aspects of operation principle, function characteristics and technical parameters.
1. Operation principle
The truss manipulator uses numerical control technology to realize automatic control, and uses various programming languages and algorithms to control various movements of the manipulator. The manipulator is usually equipped with sensors that can detect and identify information such as the shape, weight and position of the object to ensure that the robot can accurately grasp and place the object. The manipulator can achieve anisotropic movement and rotation by controlling actuators such as motors and cylinders, and can move flexibly in small Spaces.
2. Functional features
The functional characteristics of the truss manipulator mainly include the following aspects:
(1) High precision: The manipulator is equipped with high precision sensors, which can accurately and accurately detect and grasp various objects, and accurately locate and place objects.
(2) High efficiency: the manipulator can perform high-speed and high-volume operations, so that various tasks can be efficiently completed.
(3) Repeatability: the manipulator can perform the same task repeatedly, ensuring the consistency and reliability of its operation.
(4) Flexibility: the manipulator can carry out a variety of actions to change the posture of its grasp and placement of objects.
(5) Safety: The manipulator is equipped with various safety measures, such as protective cover, emergency shutdown, etc., to ensure the safety of operation.
3. Technical parameters
The technical parameters of the truss manipulator are an important basis for evaluating its performance, which mainly include:
(1) Accuracy: The accuracy of the manipulator refers to the minimum displacement it can achieve in motion, usually measured in millimeters or microns.
(2) Load capacity: The load capacity of the manipulator refers to the z large weight it can bear, usually measured in kilograms.
(3) Speed: The speed of the manipulator refers to the z high speed that it can achieve in motion, usually measured in millimeters/second or meters/minute.
(4) Working range: The working range of the manipulator refers to the scope of the working space it can cover, usually measured in cubic meters or cubic feet.
(5) Reset accuracy: The reset accuracy of the manipulator means that in the repeated operation process, the manipulator can accurately return to the initial position, usually measured in millimeters or microns.
To sum up, the truss manipulator is a high-precision, high-efficiency and repeatable robot operating technology, and its performance depends on its operating principle, functional characteristics and technical parameters. For different application scenarios, it is necessary to select appropriate truss manipulators, combined with new technologies such as modern control technology and artificial intelligence, and constantly expand the application field and research and development direction of truss manipulators to meet market demand and promote the modernization process of industrial manufacturing.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City






